My pencil work:


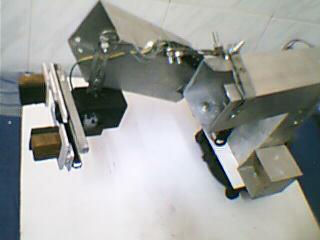
PICK & PLACE ROBOT, COLLEGE PROJECT VIDEO
VIDEO1
INDUSTRIAL ROBOT
From wikipedia, the free encyclopedia
An industrial robot is officially defined by ISO[1] as an automatically controlled, reprogrammable, multipurpose manipulator programmable in three or more axes. The field of industrial robotics may be more practically defined as the study, design and use of robot systems for manufacturing (a top-level definition relying on the prior definition of robot).
KUKAIndustrial robots doing vehicle underbody assembly (KUKA )Typical applications of industrial robots include welding, painting, ironing, assembly, pick and place, palletizing, product inspection, and testing, all accomplished with high endurance, speed, and precision.


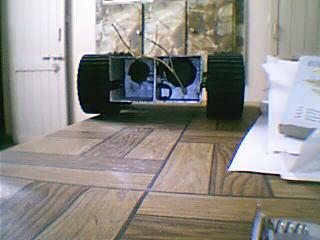
Model aircraft are flying or non-flying models of existing or imaginary aircraft, often scaled down versions of full size planes, using materials such as balsa wood, foam and fiberglass. A vast array of designs are possible, from very simple gliders, to highly accurate scale models, some of which can be very large.
Models may be built either as static non-flying models, or as flying models (also known as aeromodelling). Construction techniques for the two are usually very different.
********************
link: model plane







Hydroponics is crop production with mineral nutrient solutions instead of soil containing silt and clay. Terrestrial plants may be grown with their roots in the mineral nutrient solution only or in an inert medium, such as perlite, gravel or rockwool. A variety of techniques exist.
*************Gericke originally defined hydroponics as crop growth in mineral nutrient solutions, with no solid medium for the roots. He objected in print to people who applied the term hydroponics to other types of soilless culture such as sand culture and gravel culture. The distinction between hydroponics and soilless culture of plants has often been blurred. Soilless culture is a broader term than hydroponics; it only requires that no soils with clay or silt are used. Note that sand is a type of soil yet sand culture is considered a type of soilless culture. Hydroponics is always soilless culture, but not all soilless culture is hydroponics. Many types of soilless culture do not use the mineral nutrient solutions required for hydroponics.
Billions of container plants are produced annually, including fruit, shade and ornamental trees, shrubs, forest seedlings, vegetable seedlings, bedding plants, herbaceous perennials and vines. Most container plants are produced in soilless media, representing soilless culture. However, most are not hydroponics because the soilless medium often provides some of the mineral nutrients via slow release fertilizers, cation exchange and decomposition of the organic medium itself. Most soilless media for container plants also contain organic materials such as peat or composted bark, which provide some nitrogen to the plant. Greenhouse growth of plants in peat bags is often termed hydroponics, but technically it is not because the medium provides some of the mineral nutrients. Peat has a high cation exchange capacity and must be amended with limestone to raise the pH.
*************Hydroponics has been exaggerated as miraculous.[1] There are many widely held misconceptions regarding hydroponics, and the following facts should be noted: